本文来自微信公众号“智能汽车设计”,作者/唐洪斌。
为了解决现有被动安全相关标准制约智能汽车新技术发展的问题,根据国际标准组织和美国标准机构对智能汽车被动安全相关标准的修订工作及内容,制定了中国智能汽车被动安全标准评价体系建设方案和中国智能汽车被动安全标准发展路线图,并以一项国家强制标准进行举例说明以期为中国被动安全标准的适用性制定和修改提供必要的支撑。
1前言
伴随着人工智能以及新一代信息通信技术革命浪潮,汽车作为新技术集成应用的最佳载体之一,正在加速向智能化转型,智能汽车已经成为国际汽车产业发展的战略方向和竞争焦点[1-4]。
为了避免现有标准制约新技术的发展,本文结合国际标准组织和美国标准机构对智能汽车被动安全相关标准的修订工作原则和方法,开展了中国智能汽车被动安全标准评价体系建设方案和中国智能汽车被动安全标准发展路线的研究工作,并针对被动安全相关标准的修订进行了初步探究。
2国外智能汽车被动安全相关标准研究进展
2.1美国NHTSA针对智能汽车被动安全相关标准的修订原则和范围
美国自2016年开始对美国现有被动安全标准进行了系统地扫描,以便应对智能汽车技术的发展带来的冲突和影响[5]。美国高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)在2018年9月28日发布了智能汽车驾驶系统的可测试案例和场景框架[6],在2019年5月28日发布了预先通知建议规则(Advance Notice of Proposed Rule Making,ANPRM),用来解决未来智能汽车的开发对碰撞安全性能产生影响的问题[7-8]。为解决新型车辆设计的问题(尤其是非乘用车,或是对驾驶员位置和操控形式进行重大修改的车辆),NHTSA在2020年3月30日发布了一项规则制定提案,修改了几项耐撞性法规,以明确无驾驶员控制的机动车辆的安全标准[9]。2021年1月13日,NHTSA推出了最终版提案,消除了重大的、不必要的法规障碍,为未来智能汽车的生产、销售和使用铺平道路[10-11]。2022年3月10日,NHT⁃SA发布了最终规则,该规则更新了乘员保护联邦机动车辆安全标准,以确保自动驾驶汽车乘员的安全。
2.1.1 NHTSA针对智能汽车被动安全相关标准的修订原则
第一,要保持智能汽车和传统汽车具有相同的乘员保护性能;第二,去掉针对智能汽车开发可能产生的不需要进行监管的条文要求;第三,修订后的要求有利于配备智能汽车技术的车辆,且不改变对非智能汽车的要求;最后,根据美国运输部指南《为未来运输作准备:自动车辆3.0》中概述的原则,修订后的要求以保持技术中立,即既不倾向主动安全也不倾向被动安全的方式对美国汽车安全技术法规(Federal Motor Vehicle Safety Stan⁃dard,FMVSS)进行修改,并以更能反映某些创新内饰的方式对FMVSS进行修改。
2.1.2 NHTSA针对智能汽车被动安全相关标准修订的前提条件
a.假定智能汽车座椅布局与传统车辆相同,其他形式的座椅布局需要进一步的研究。
b.针对只载货(无/少乘客)的车辆修订了碰撞安全性的要求,但未考虑其相容性的问题。
c.修订仅限于200系列FMVSS,不适用于300系列标准。不修改与信号装置和警告相关的要求,因为该领域的影响超出了200系列标准,并且是NHTSA继续研究的主题。但安全气囊抑制信号装置的修改计划在未来单独发布通知。
2.1.3 NHTSA针对智能汽车被动安全相关标准修订的范围
针对无驾驶员座位,但是有多个前排乘员座位的情况进行了修订。针对前排安全气囊指示灯和抑制装置,建议分开显示,并且在每一个前排乘坐位置乘坐时均可见。
针对中型客车(整备质量为4 536~11 793 kg)和校车(整备质量大于4 536 kg)安全带要求进行了修订,针对智能汽车无驾驶员的情况,建议车辆前排座椅满足与驾驶员座椅相同的要求。
当车辆没有转向盘和转向装置时,FMVSS 203和FMVSS 204将不适用于对智能汽车的评价。建议不将乘员保护标准应用于仅用于载货的车辆(“无乘员”车辆),这种要求可通过修改适用范围来实现,以表明该标准仅适用于带有驾驶员的“卡车”。
NHTSA对FMVSS 201、FMVSS 205、FMVSS 206、FMVSS 207、FMVSS 208、FMVSS 214、FMVSS 216和FMVSS 226进行了修订。
2.2 WP.29被动安全性工作组针对智能汽车被动安全相关标准的修订范围
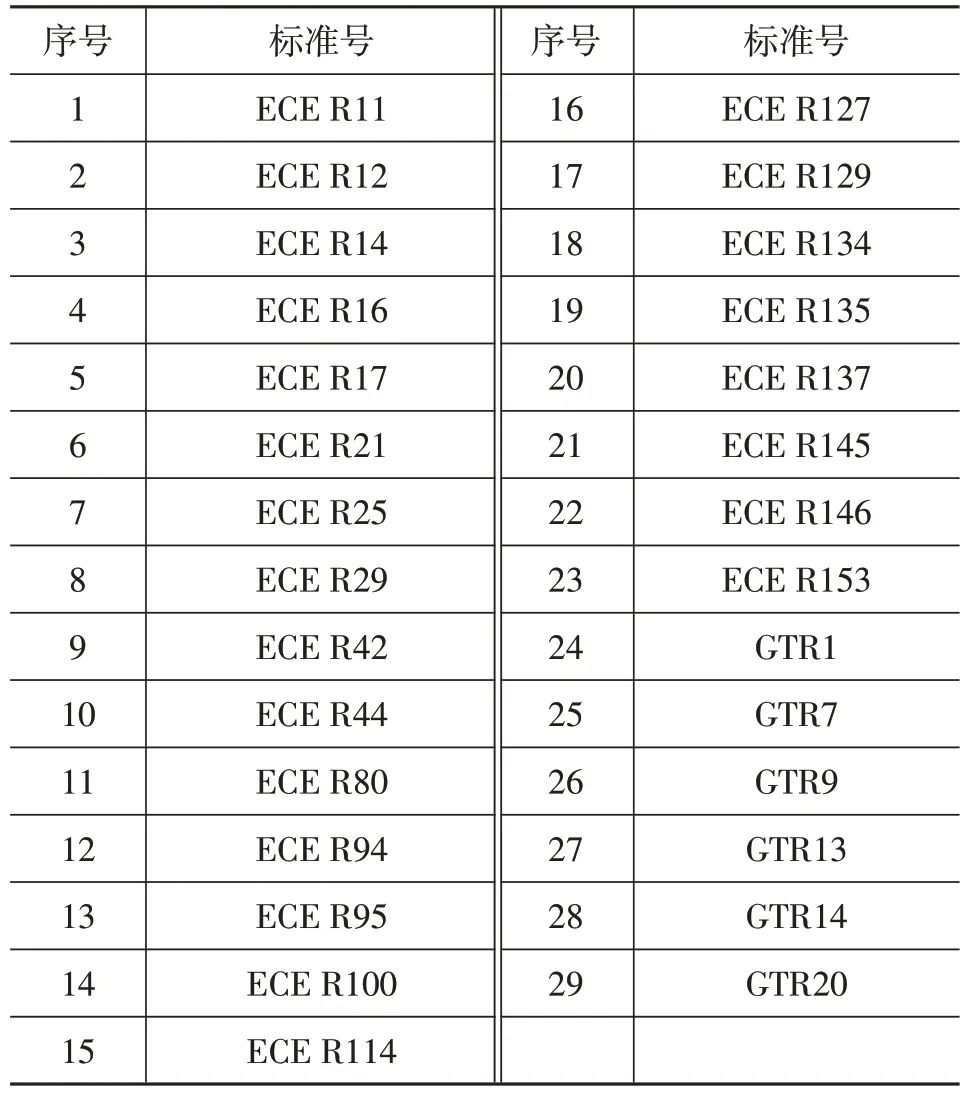
在2022年5月10日世界车辆法规协调论坛(World Forum for the Harmonization of Vehicle Regulations,WP.29)的被动安全性工作组(The Working Party on Passive Safety,GRSP)第71届会议中成立了被动安全标准与智能汽车相关功能协调性研究工作组,旨在研究目前被动安全相关联合国欧洲经济委员会汽车法规(the regulation of Economic Commission of Europe,ECE)和全球技术法规(Global Technical Regulation,GTR)标准中与未来智能汽车技术的兼容问题,以便推动智能汽车被动安全性能的合理发展[12]。
目前该项工作处于初期阶段,涉及的主要相关ECE和GTR被动安全国际标准清单如表1所示。
表1主要相关的ECE被动安全国际标准
3国内智能汽车被动安全相关标准研究进展
3.1智能汽车标准发展与被动安全国家强制标准发展现状
近年来,中国智能汽车产量迅速增长,主动安全和被动安全相结合的技术也有了一定的发展。汽车安全技术的规划和发展催生了主动安全和被动安全标准的制定和升级[13-15]。
智能汽车标准主要由全国汽车标准化技术委员会(National Technical Committee of Auto Standardization,SAC/TC114)负责组织制定,标准划分为基础、通用规范、产品与技术应用、资源管理与信息服务及相关标准。到目前为止已发布智能汽车标准12项,另有26项标准处于研究中、立项或待发布状态。标准主要依据智能车辆的功能安全、信息安全、网络安全和人机交互方面进行技术功能和性能的约定,并未对车辆乘员的保护性能进行要求。
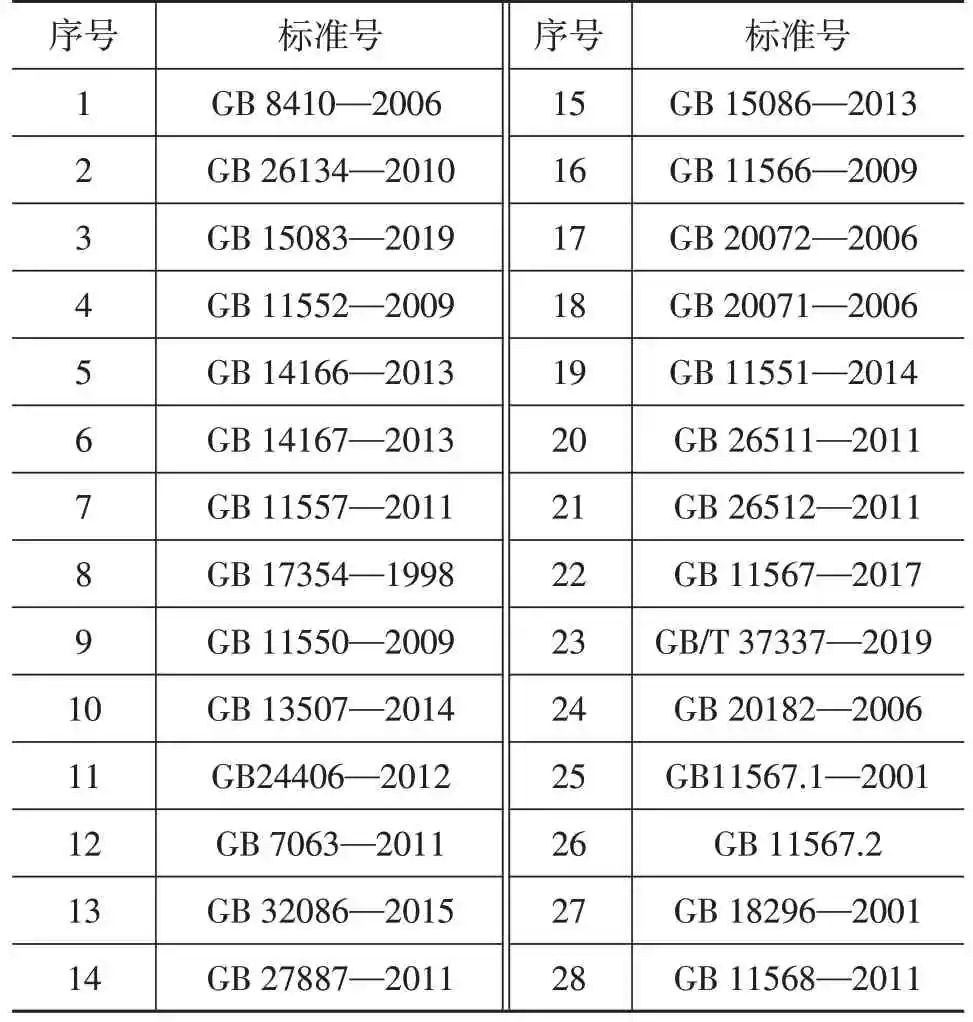
汽车被动安全标准主要由全国汽车标准化技术委员会汽车碰撞试验及碰撞防护分技术委员会SAC/TC114/SC33负责组织制定。目前已批准发布汽车强制性国家标准96项,其中汽车被动安全标准28项,占比29%,如表2所示。标准主要集中在对整车及其部件在碰撞过程中的性能要求,以及对车内乘员的保护要求,并未针对智能汽车新功能和新部件对乘员伤害产生的影响进行规定。
表2被动安全国家强制标准
智能车辆主动安全功能和部件(如自动紧急制动功能)完全改变了车辆乘员在发生碰撞时的运动姿态和位置,传统的被动安全系统将无法正确地将乘员伤害最小化;另外,在未来无驾驶员或车内乘员乘坐姿态变化的情况下,现行标准内容将存在技术冲突和产品性能要求冲突的问题。为了避免现行国家标准内容限制先进技术的发展进步,有必要对现行国家标准进行系统性的技术内容扫描,提出对应的修改建议,以便促进汽车行业合理有序发展。
3.2中国智能汽车被动安全标准评价体系建设方案
结合目前智能汽车技术发展趋势和相关国家、国际标准组织对智能汽车被动安全相关标准的修订过程,依据标准内容和修订方向,在保障有利于配备智能汽车技术的车辆且不改变非智能汽车的要求的基础上,初步建立了中国智能汽车被动安全标准体系建设方案。
3.2.1体系建设前提
a.智能商用车辆无乘员;
b.智能乘用车无驾驶员;
c.智能汽车无转向盘(或存在可收缩式转向盘);
d.存在新内饰的变化及座椅布置位置和形式的变化。
3.2.2体系建设原则
在未来实际交通环境中必然存在传统车辆和智能汽车,2种类型车辆必须保证具有相同的乘员保护性能。修订的内容应有助于智能汽车技术的发展,以及可能产生的内饰结构或布置等新的变化,不能限制相关领域技术创新和技术进步。修订内容应有利于智能汽车的发展,但不能改变对传统车辆原有的要求。
3.2.3体系建设内容
针对智能汽车和传统车辆并存的情况,需要对相应标准内容进行修订:
a.针对车辆类型是否是智能汽车,对标准适用范围进行修订;
b.针对有无驾驶员、转向控制机构和新的内饰布置及变化,对术语和相应的试验实施过程进行修订;
c.针对安全气囊和安全带在前排位置的变化,需要对座椅布置要求和乘员保护要求进行修订;
d.针对乘员位置的变化,需要对安全气囊和安全带警告装置要求进行修订;
e.针对新内饰和座椅布置的变化,需要对相应部件和整车碰撞标准内容进行适应性修订;
f.针对智能汽车主动安全装置起作用的情况下,需要对相关标准试验方法和过程进行修订。
3.3中国智能汽车被动安全标准发展路线图
根据智能汽车发展规划,2025年高度自动驾驶(Highly Autonomous driving,HA)技术开始进入市场,2030年实现HA级智能网联汽车在高速公路广泛应用,在部分城市道路规模化应用,2035年以后HA级、完全自动驾驶(Fully Autonomous driving,FA)级智能网联车辆具备与其他交通参与者间的网联协同决策与控制能力,各类高度自动驾驶车辆广泛运行于中国广大地区。
智能汽车被动安全标准体系发展总体路线如图1所示,在智能汽车可实现技术的基础上,兼顾了乘用车、货运车辆和客运车辆的智能发展需求,构建了整车和部件方向的技术架构,主要涵盖了智能汽车主动安全装置起作用条件下整车碰撞试验技术、新内饰新姿态下乘员保护评价技术和新型碰撞模式下部件碰撞试验技术等重点研究方向。
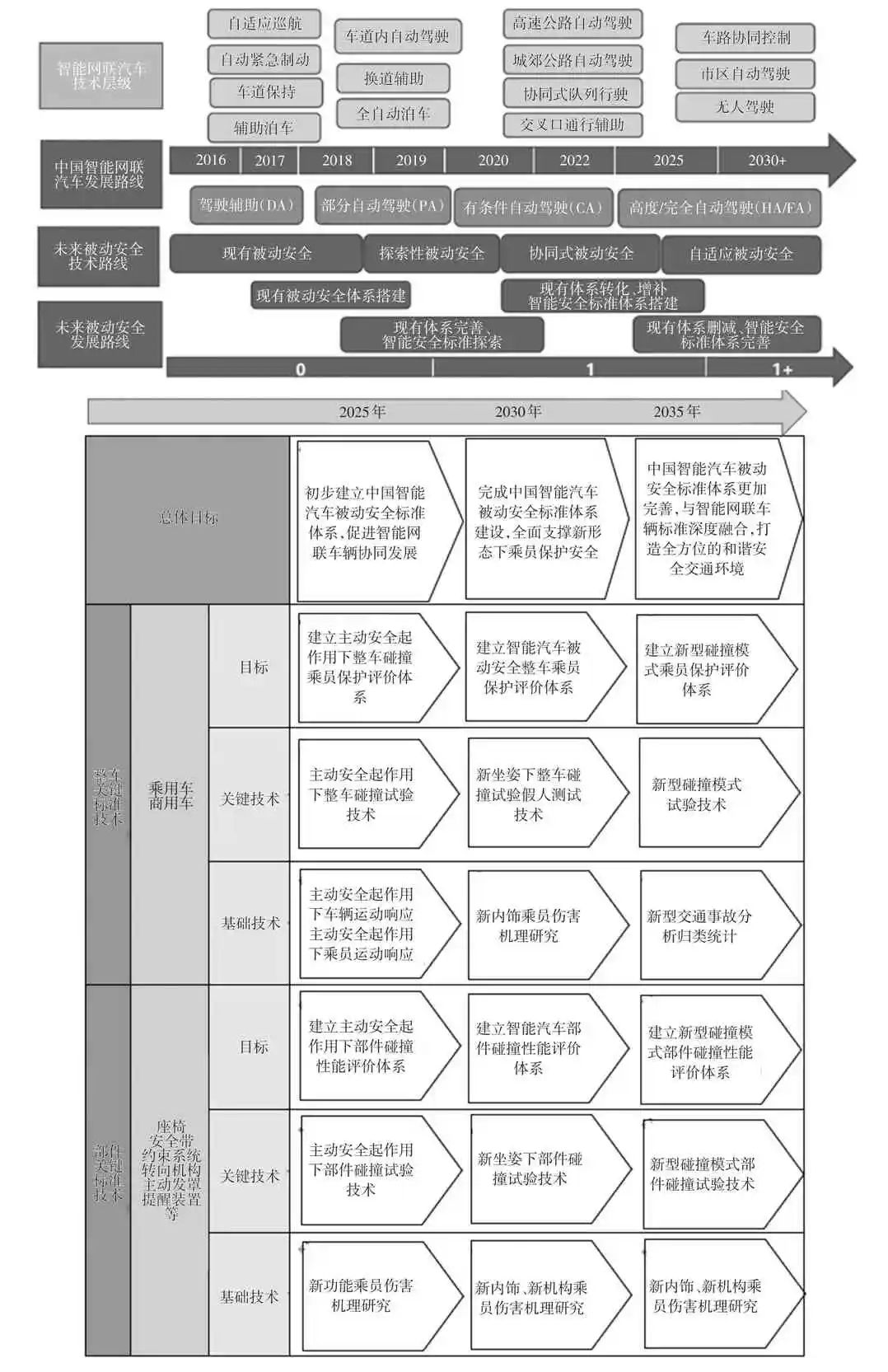
图1智能汽车被动安全标准体系发展总体路线图
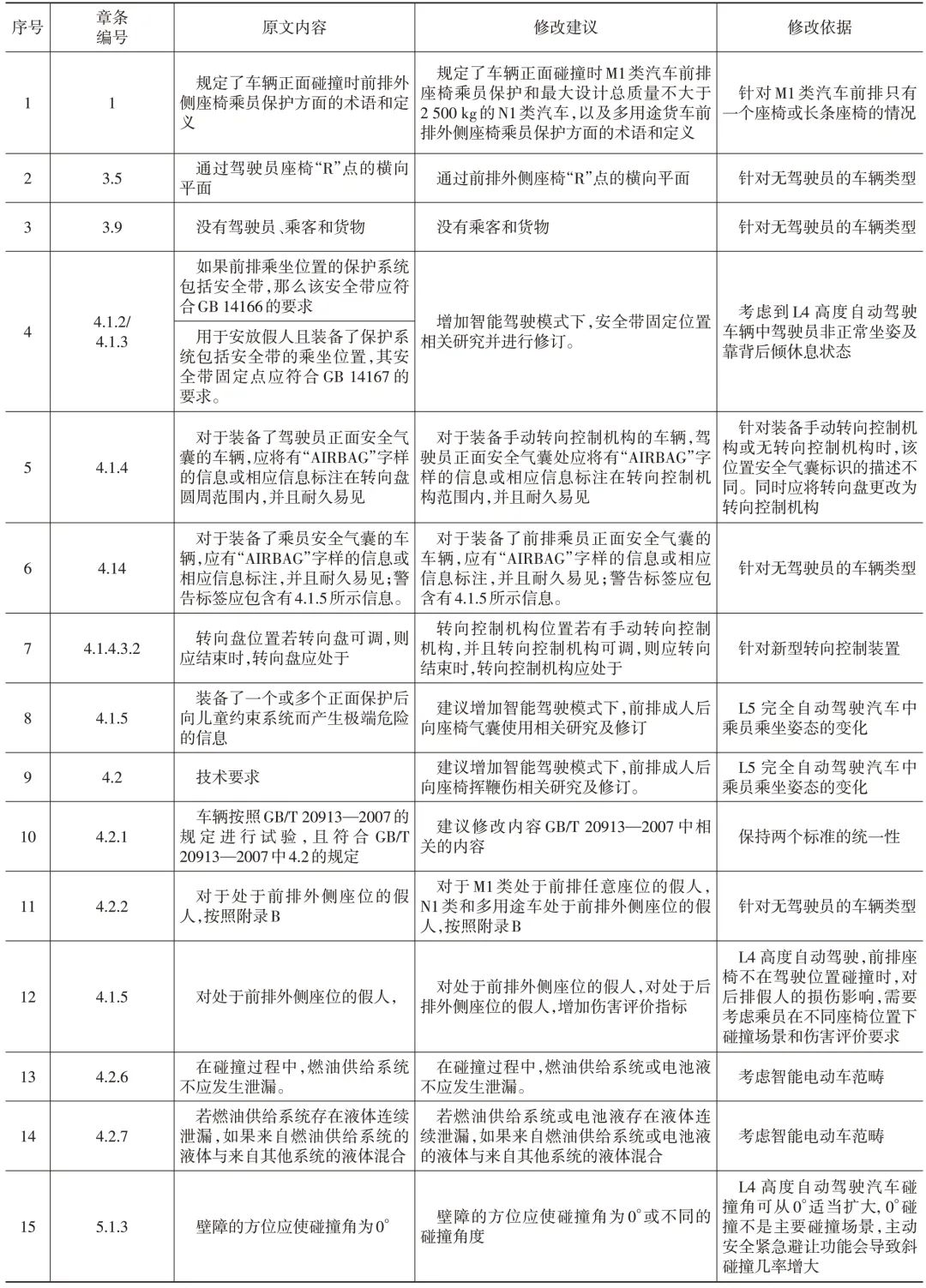
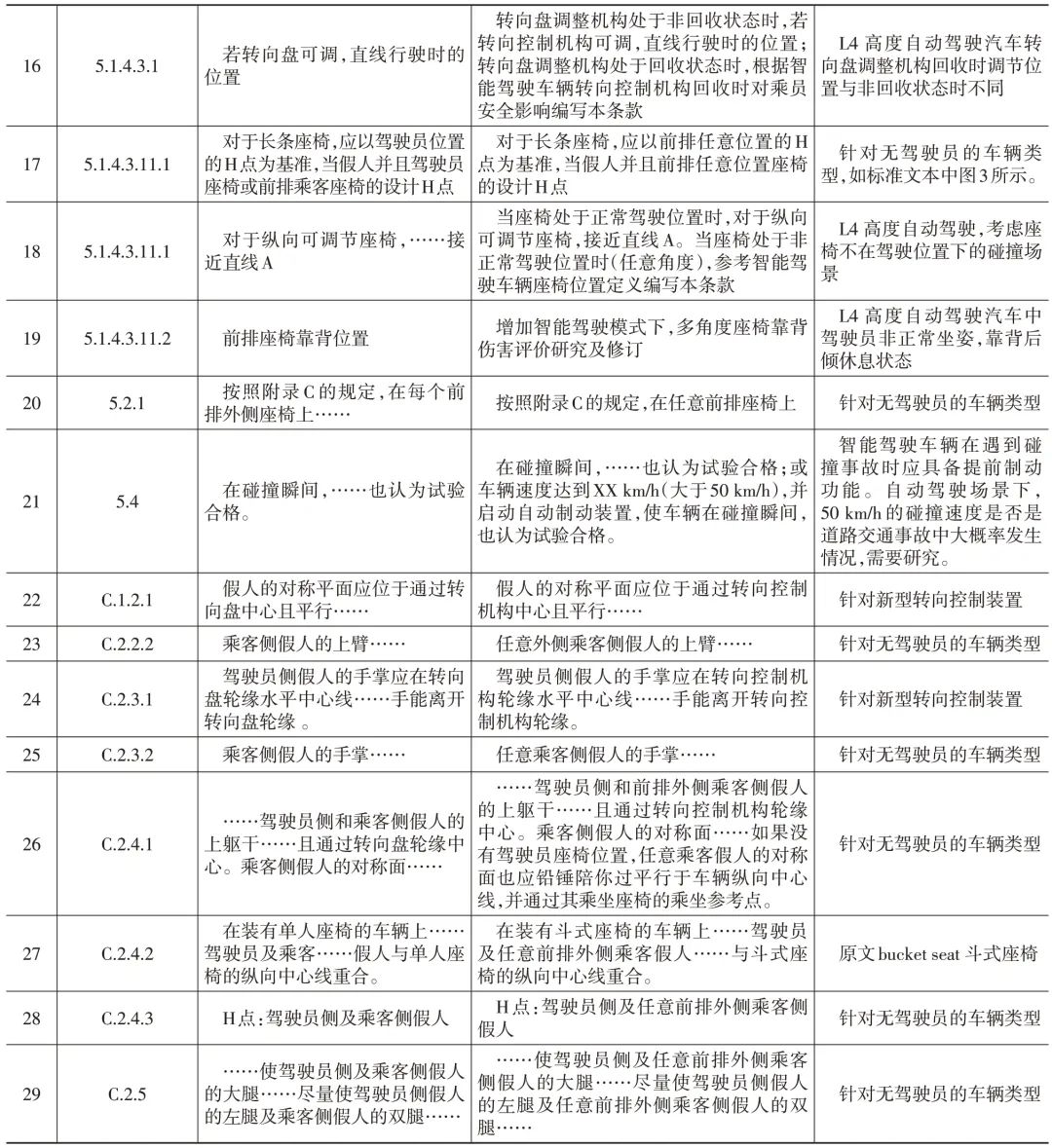
3.4中国被动安全强制标准分析案例
结合智能汽车发展各阶段、安全场景、可能的未来事故场景等方面,开展对应标准领域技术发展趋势分析;同步梳理标准内容,开展标准内容的适用性分析。由此确定标准是否符合智能汽车发展趋势,是否需要废止、修订、加强、新增等。以GB 11551—2014《汽车正面碰撞的乘员保护》为例,标准建议修订内容如表3所示[16]。
表3主要相关的中国被动安全国家强制标准
4结束语
本文根据中国智能汽车标准和中国被动安全国家强制性标准的发展现状,分析了各自标准的关注焦点。智能汽车标准主要针对车辆的功能安全、信息安全、网络安全和人机交互方面进行技术功能和性能的约定,并未对车辆乘员的保护效果进行性能要求;而被动安全国家强制标准主要集中在车辆及其部件在碰撞过程中的性能要求,以及对车内乘员的保护要求,并未对智能汽车新功能和新部件对乘员伤害产生的影响进行性能要求。为了促进新技术的发展和真正实现乘员伤害的最小化,本文针对未来智能车辆被动安全相关标准的制定和修订工作进行了初步探索,结合国际标准组织和美国标准机构对智能汽车被动安全相关标准的修订工作原则和方法,提出了中国智能汽车被动安全标准评价体系建设方案和中国智能汽车被动安全标准发展路线图。
参考文献
[1]未来智库.巨人的游戏——2020汽车自动驾驶发展路径和产业链全景图[R/OL].(2020-01-16)[2023-03-24].https://www.vzkoo.com/document/0c24574f6a8c2be039927a 4d63d678b9.html?keyword.vzkoo.com.Giant’s Game:2020 Auto Driving Development Path and Panorama of Industrial Chain[R/OL].(2020-01-16)[2023-03-24].https://www.vzkoo.com/document/0c24574f6a8c2be039927a4d63d678b9.html?keyword.
[2]北京百度网讯科技有限公司.自动驾驶安全第一白皮书[R].北京:北京百度网讯科技有限公司,2019.Beijing Baidu Netcom Science Technology Co.,Ltd..The First White Paper on Autonomous Driving Safety[R].Beijing:Beijing Baidu Netcom Science Technology Co.,Ltd.,2019.
[3]ERTRAC.Automated Driving Roadmap[R].Brussels:ER⁃TRAC Working Group,2017.
[4]European Commission.High Level Group on the Competi⁃tiveness and Sustainable Growth of the Automotive Industry in the European Union(GEAR 2030)[R].Brussels:European Commission,2017.
[5]KIM A,PERLMAN D,BOGARD D,et al.Review of Federal Motor Vehicle Safety Standards(FMVSS)for Automated Vehicles:Identifying Potential Barriers and Challenges for the Certification of Automated Vehicles Using Existing FMVSS:DOT-VNTSC-OSTR-16-03[R/OL].Washington,DC:United States Department of Transportation.(2016-03-11)[2023-3.24].https://ntl.bts.gov/ntl.
[6]THORN E,KIMMEL S C,CHAKA M.A Framework for Automated Driving System Testable Cases and Scenarios:DOT HS 812 623[R].Washington,DC:National Highway Traffic Safety Administration,2018.
[7]NHTSA.Removing Regulatory Barriers for Vehicles with Automated Driving Systems:83 FR 6148[R].Washington,DC:National Highway Traffic Safety Administration,2018.
[8]NHTSA.Removing Regulatory Barriers for Vehicles with Automated Driving Systems:RIN 2127-AM00[R].Washington,DC:National Highway Traffic Safety Administration,2019.
[9]NHTSA.Occupant Protection for Automated Driving Systems:RIN 2127-AM06[R].Washington,DC:National Highway Traffic Safety Administration,2020.
[10]NHTSA.Occupant Protection for Vehicles with Automated Driving Systems:RIN 2127-AM06[R].Washington,DC:National Highway Traffic Safety Administration,2021.
[11]NICHOLAS C,JOHN M,MARK S.Autonomous Vehicles:Uncertainties and Energy Implications[R].Washington,DC:U.S.Energy Information Administration,2018.
[12]WP.29 GRSP.Report of the Working Party on Passive Safety on Its Seventy-First Session[R].Geneva:UNECE,2022.
[13]中国汽车技术研究中心有限公司.中国汽车安全发展报告[R].北京:中国汽车技术研究中心有限公司,2020.China Automotive Technology Research Center Co.,Ltd..Annual Report on Automobile Safety in China[R].Beijing:China Automotive Technology Research Center Co.,Ltd.,2020.
[14]陈杰.汽车主被动集成安全发展趋势研究[J].无线互联科技,2021,18(3):81-82.CHEN J.Discussion on the Development Trend of Automotive Active-Passive Integrated Safety[J].Wireless Internet Technology,2021,18(3):81-82.
[15]谢伟平,穆国宝,何凯欣,等.浅谈被动安全系统对汽车安全性能的作用及未来发展趋势[J].汽车零部件,2018(7):90-93.XIE W P,MU G B,HE K X,et al.Research on Passive Safety Systems for Car Safety and Its Development Trend[J].Automobile Parts,2018(7):90-93.
[16]中华人民共和国工业和信息化部.汽车正面碰撞的乘员保护:GB 11551—2014[S].北京:中国标准出版社,2014.Ministry of Industry and Information Technology of the People’s Republic of China.The Protection of the Occupants in the Event of a Frontal Collision for Motor Vehicle:GB 11551—2014[S].Beijing:Standards Press of China,2014.
