车联网云平台场景化的千人千面智能服务,通过对多源实时数据进行动态场景识别,并结合云端的强化学习算法,增强了多场景识别的准确性,解决了当前生态使用场景个性化缺失、识别准确率低的问题。同时,为了确保在生态提供方变更接口后,不至于影响到系统的正常使用,我们还提出了服务自适应动态适配技术,实现了基本无需人工干预的生态接口自适应,减少了后续的运维成本,另外,云端的模型还能够根据用户行为数据来对模型自身进行反向调优,实现算法的不断演进和优化,进一步提高模型的准确性,为客户带来优质的智能服务体验。
一、实施背景
新四化,是在党的十八大报告中提出的:“坚持走中国特色新型工业化、信息化、城镇化、农业现代化道路,推动信息化和工业化深度融合、工业化和城镇化良性互动、城镇化和农业现代化相互协调,促进工业化、信息化、城镇化、农业现代化同步发展。”在政府的政策指导下,在汽车领域有了“汽车新四化”是电动化、网联化、智能化、共享化。电气化是指新能源动力系统领域;智能是指无人驾驶或驾驶员辅助的电子系统;联网是指车联网的布局;共享是指汽车共享和移动出行。
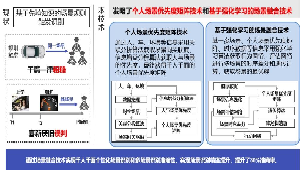
汽车数字化、智能化是国家坚定不移的战略发展方向之一,而汽车座舱服务单一,缺乏多元化、场景化、智能化问题:包括用户请求是多元和不断在变化,以及生态服务接入困难更新慢;业务服务非常割裂、碎片化,缺乏场景联动问题;当前指令式服务,缺乏场景主动感知、缺少服务预测、缺少基于实时场景的智能服务等问题,很难满足车主用户对智能汽车的诉求。
二、实施目标
首先,通过车联网云平台场景化的千人千面智能服务实现千人千面个性化场景识别和多场景识别准确性,目标实现场景识别精度提升。其次,解决了生态服务资源多接入复杂、使用不便问题,实现服务接口动态自适应配置,形成生态统一形式的接口,此外,基于场景感知的算法模型智能适配技术,目标实现基于场景的个性化服务推荐。最后,解决了模型评估单一、不准确的问题,目标实现模型评估的准确性提升。在线算法优化演进技术解决了目前离线调优模型时效率低、实时性差的问题,通过在线模型优化演进技术实现模型在线升级进化,进而提升车联网平台平台服务推荐的质量和智能化进步,车联网云平台场景化的千人千面智能服务为车主用户提供更加优质智能服务。
三、建设内容
联网云平台场景化的千人千面智能服务主要实现了3个技术内容创新:
场景端云融合识别技术、服务自适应动态适配技术、服务的算法优化演进技术。
1、场景端云融合识别技术
在场景识别方面,开发了个人场景优先度矩阵技术,实现了人、车、环境与时空场景进行信息增益算法分析获取人与场景的优先度矩阵,而场景间采用关联算法分析,获取场景间的关联度矩阵,综合构建出个人场景优先度矩阵,实现千人千面的场景化能力。此外,我们通过基于强化学习的场景融合技术,强化学习通过评估网络模型和行动网络模型获得用户当前最优场景,提升了场景识别的准确率,参见图1。
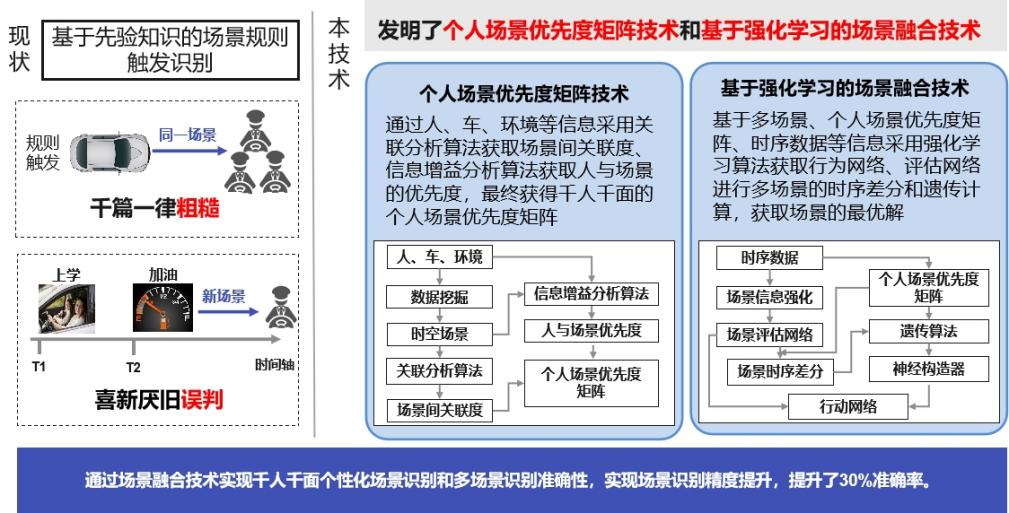
图1.场景端云融合识别技术
个人场景优先度矩阵技术,实现了人、车、环境与时空场景进行信息增益算法分析获取人与场景的优先度矩阵,充分获取用户与时空场景真实的数字空间中关联,此外,通过个人场景间的关联度分析获取个人场景间的关联度,进而保证了场景间的时序和前后关联。进而解决了之前产品的场景单一、个性化不足而且场景识别精度不足问题。
根据我们的研究,我们实现人、车、环境与时空场景的信息增益:
1)人与场景的信息增益算法分析
信息增益算法用于选择划分的特征。信息增益越大,说明划分效果越好。
信息熵描述了事件的不确定性,熵越大,含有的信息量就越大,如果某个事件有n个结果,每个结果的概率为pn。那么这个事件的熵H(p)的定义为:
2)基于强化学习算法的场景融合技术
强化学习是智能体(agent)以“试错”的方式进行学习,通过与环境进行交互获得的奖赏指导行为,目标是使智能体获得最大的奖赏。强化学习由状态(state),行为(action)和回报(reward)组成。在场景融合技术中,人称为agent,时间和场景称为state,人在当前state去往下一个state的过程称为action,某个state下执行哪个action用q-value函数评估。执行action后对目标的达成程度用reward评估,q-value或reward越高,表示效果越好。在一个指定的state下,行动网络用于选择action,评估网络用于评估选择的action的好坏。行动网络用Q-learning实现。
2、服务自适应动态适配技术
在服务推荐方面,构建服务自适应动态适配技术实现了自适应服务接口变化的动态适配技术和基于场景感知的动态适配技术,不仅能够屏蔽进化前后应用程序接口调用的差异,同时能根据场景不同自动匹配合适的生态服务,提升了服务内容推荐的智能化、个性化,参见图2。
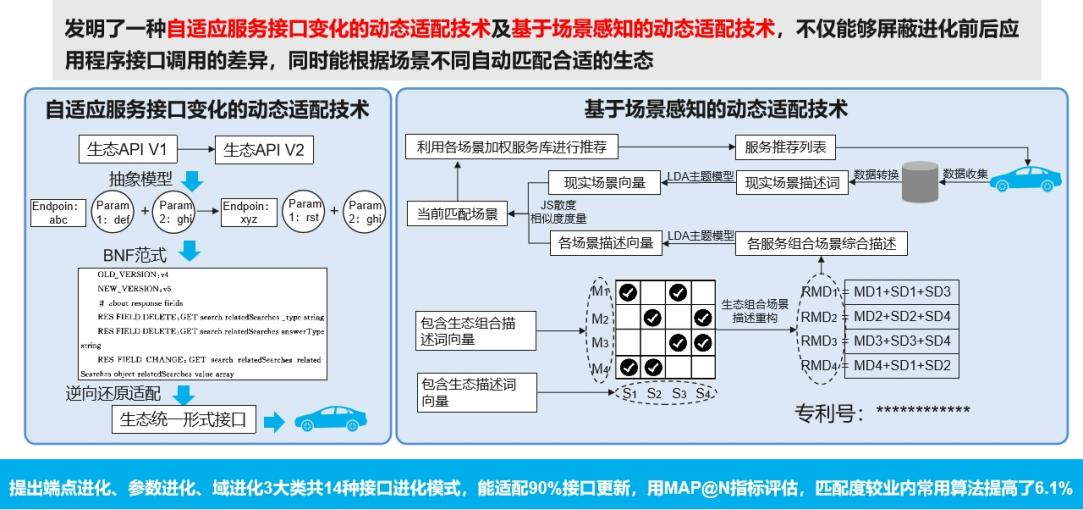
图2.服务自适应动态适配技术
基于场景的生态服务推荐模型(Service Recommendation Based on Scenario Recog‐nition,SRBSR)。基于场景的生态服务推荐模型旨在通过准确识别用户及场景需求,自动地为用户推荐可能满足特定场景下的需求服务列表,从而帮助用户快速使用生态服务。
3、服务的算法优化演进技术
在服务的算法优化演进方面,开发了多模态反馈评估技术,对多模态信息进行用户行为、情绪识别、语意识别等多维度多评估模型的综合模型评估,构建了情感评估模型(满意度、兴趣度、信任度)和表象评估模型(参与度、接收度、准确度)解决行为评估的数据少、准确性差的问题,生成有效的模型质量指标表,此外,开发了在线模型优化演进技术,基于模型质量指标表对模型自动进行参数优化和特征优化,实现服务的算法模型自动优化。
1)多模态反馈评估技术
算法服务质量的提升来源于算法模型不断优化迭代,现如今算法模型很多采用离线单独训练,这样优化迭代周期比较长,难以满足智能服务的需求,我们采用多模态反馈评估技术采用情绪评估模型包括信任度、满意度、兴趣度的度量,表象评价模型采用参与度、接受度、准确度的度量,算法评估精度。
2)在线模型优化演进技术
目前离线调优模型时效率低、实时性差的问题,通过在线模型优化演进技术实现模型在线升级进化,主要实现方法基于模型质量指标表对模型自动进行参数优化和特征优化,实现服务的算法模型自动优化,进而提升车联网平台平台服务推荐的质量和智能化进步。
①递归特征消除
特征子集的选择应该建立在当前特征子集上的性能和一个标准模型的性能之间的差异基础上,而且还受许多参数如特征子集大小、迭代步长等的限制。所以,递归特征消除法是一种探索性的、启发式的方法,其结果可能会受到参数的选择和模型集成方式的影响。
递归特征消除法有两种实现方式,分别是“递归式”和“迭代式”。递归式特征消除法是一种通过不断地削减当前特征集合,来评估和选择重要特征的方法。具体过程如下:
A.对原始特征集合进行训练,并计算出每个特征的权重。
B.排除权重最小的若干个特征,得到一个新的、更小的特征集合,并重新训练模型。
C.重复上述过程,直到达到预设的特征数量、特征重要性排名、或者其他终止条件为止。
②参数寻优算法
传统的参数调优方式是GridSearch,用穷举的方式对搜索空间的每个超参数进行组合,缺点是一旦参数很多,计算代价非常大。目前较流行的是TPE(Tree-structured Parzen Estimator)调参,是一种基于树结构的贝叶斯优化算法,可以理解为在图结构的参数空间上不断寻找目标函数最优解的问题。TPE调参的具体过程如下:
A.定义超参数搜索空间,如学习率、树的深度等。
B.构建推荐器树和评估器树,以实现对超参数的优化。推荐器树使用条件概率分布来生成候选超参数配置。对于每个超参数,推荐器树计算一个条件概率分布函数P(x|y),其中x是超参数取值,y是该配置对应的性能指标。
车联网云平台场景化千人千面智能服务,凭借着个人场景优先度矩阵技术提升了千人千面的个人场景识别的精度,通过强化学习的场景融合技术解决多场景融合的场景质量;服务自适应动态适配技术很好完成了服务的动态适配和基于场景感知的动态适配服务的技术,保证的用户当前场景下服务推荐质量;此外,服务的算法演进技术实现算法在线不断优化升级,保证了我们智能系统服务质量和满足用户智能服务要求,主要应用项目有:东风windlink,东风岚图平台,红旗车联网平台、奔腾车联网平台等。
四、实施效果
车厂通过车联网云平台场景化的千人千面智能服务,有效提升了智能座舱服务质量,具体实施效果如下:
1.通过场景融合技术实现千人千面个性化场景识别和多场景识别准确性,实现场景识别精度提升,提升了30%准确率。
2.接口进化模式能适配90%接口更新,用MAP N指标评估,匹配度较业内常用算法提高了6.1%
3.通过多模态反馈评估技术解决了行为评估数据单一、准确率低问题,在线模型优化演进技术实现模型在线优化演进保证快速优化算法模型,保证模型质量,提升服务的智能化。
4.车联网云平台场景化千人千面智能服务获得相关发明26项,软著4项;
产品服务5家主机厂,覆盖近10个品牌,支撑了10多个项目,服务超过50万+台车。