
随着全球光伏设备数量和规模的增长,对光伏电站可靠性和最优性能的需求也在增长。因此,必须开发快速、有效的检测技术,以经济有效的方式进行运维作业。
随着商业无人驾驶飞行器(UAV)的出现,空中巡检成为一种新颖的运维方法,这似乎是应对上述挑战的大有可为的方法。本文旨在讨论大型光伏电站空中检查的相关优势和挑战,讨论无人机与目视检查、红外热成像(IRT)和电致发光(EL)等综合检查方法的关联。
无人机通常是能够远程或自主操作的小型飞机。它们最初是为军事目的设计的。然而,无人驾驶飞行器领域的最新进展和成本的下降使这种技术开始被用于救灾、能源、电力线路检查以及环境、森林和矿山监测等民用领域。这种技术已经越来越普及,特别是在能源和农业领域。
由于无人机在实地覆盖、可靠成像、快速探测、高耐久性、轻重量、低成本以及恶劣环境中的稳健运行等方面的优越性,多年来,使用无人机检查大型光伏电站的情况有了很大的发展。无人机是与RGB相机或红外热成像(IRT)或电致发光(EL)相机一起使用的。
这种设备的广泛使用也令控制和路线规划软件的使用变多了。在有精确的现场GPS数据的情况下,事先定义飞行路径可以更加稳定、安全、有效地进行检查。
尽管如此,这并不影响拥有一支训练有素的员工队伍进行飞行作业。取决于无人机和摄像机的质量、电厂的形状、飞行过程中的风速以及检查的目标,航线的高度、方向和速度都会有所不同。
图1.对光伏电站进行空中巡查的不同路线类型,用红色标注。左边与光伏组件阵列平行,右边与光伏组件正相交。
例如,如图1所示,路线的方向可以与组件阵列平行,也可以正相交。这两种方法不相伯仲,但行间距离和电站设计因素可以使其中一种方法比另一种方法更快。平行航线的优点是便于断层的地理定位,而正交航线一次可覆盖更多组件,因此在高空飞行时通常更有效。
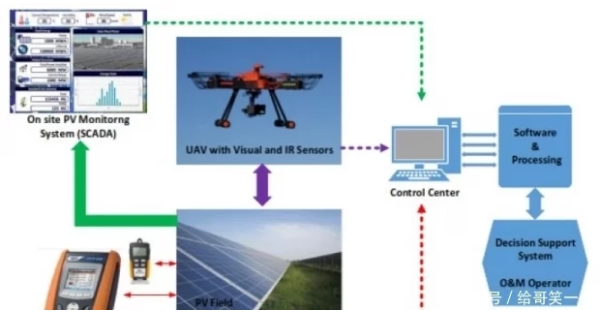
图2.光伏电站自主监测系统概念示意图
根据文献记载,也有人试图自主确定无人机的最佳路径规划,由此发展出自主监测的概念。这是一种将各种技术、设备、系统和平台整合在一起,通过提高光伏监测准确性提升光伏系统性能、可靠性和使用寿命的全新概念。通过这种方式,一个综合系统可以提供光伏监测的全部服务。
如要实施这种方法,首先要通过神经网络确定光伏电站的边界。为此,光伏电站的各种正射照片会被用于训练神经网络。之后设计的一种静态路径规划算法可用于创建光伏电站检测的最优路径。
此外,动态路径规划是根据飞行情况创建的,会在执行特定机动动作后对无人机性能进行检查。也就是说,如果无人机不能完成初始路径,那么动态路径规划就会启动,根据无人机的位置和耐力创建新的最佳路径。
